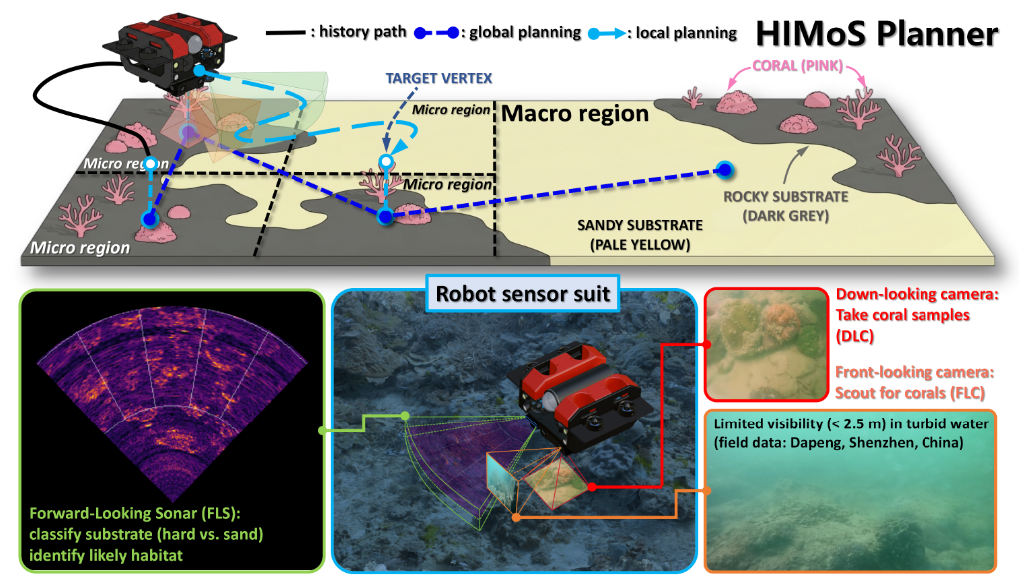
Hierarchical Multi-Modal Planning for Fixed-Altitude Sparse Benthic Target Search and Sampling
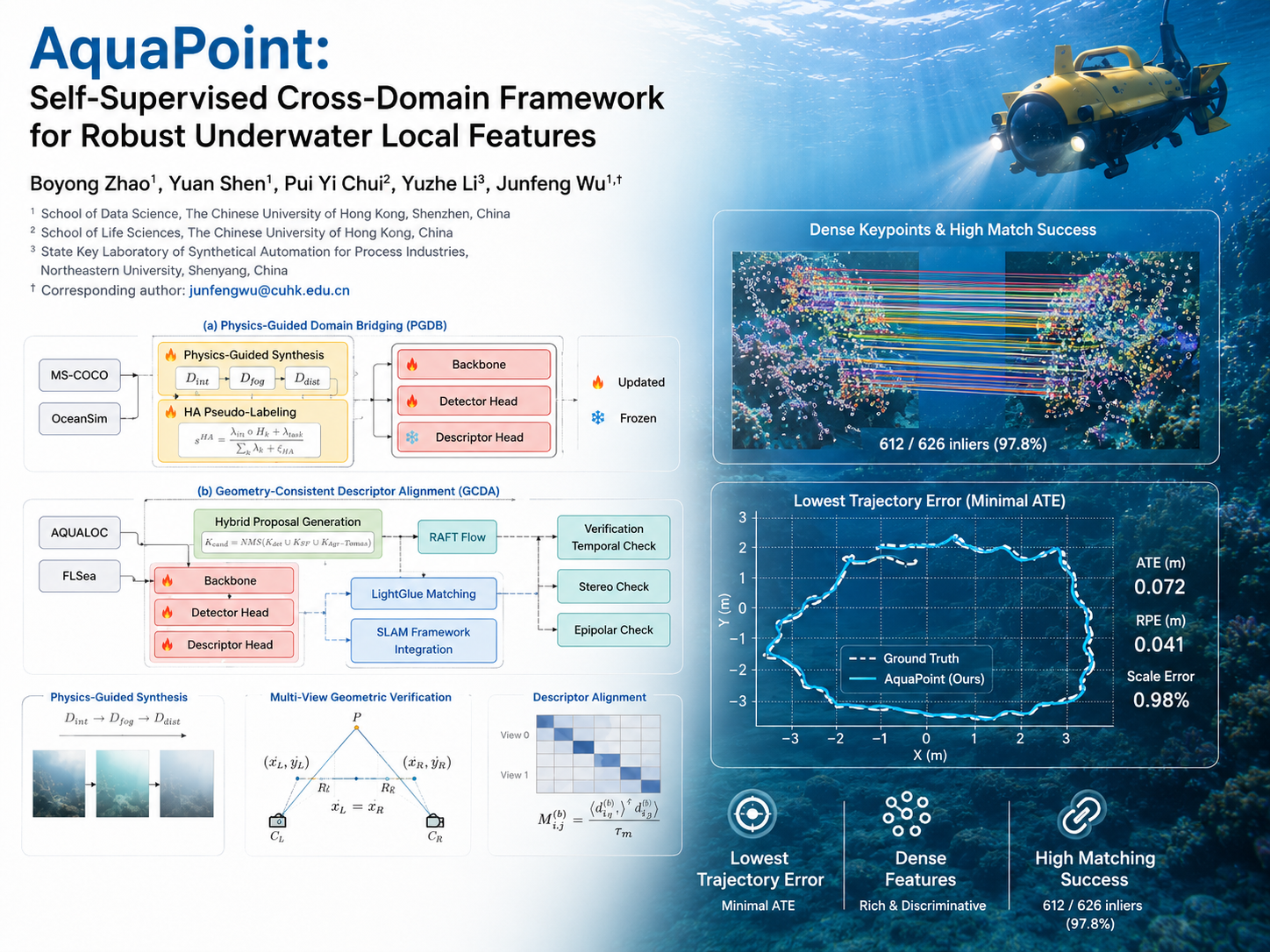
AquaPoint: Self-Supervised Cross-Domain Framework for Robust Underwater Local Features
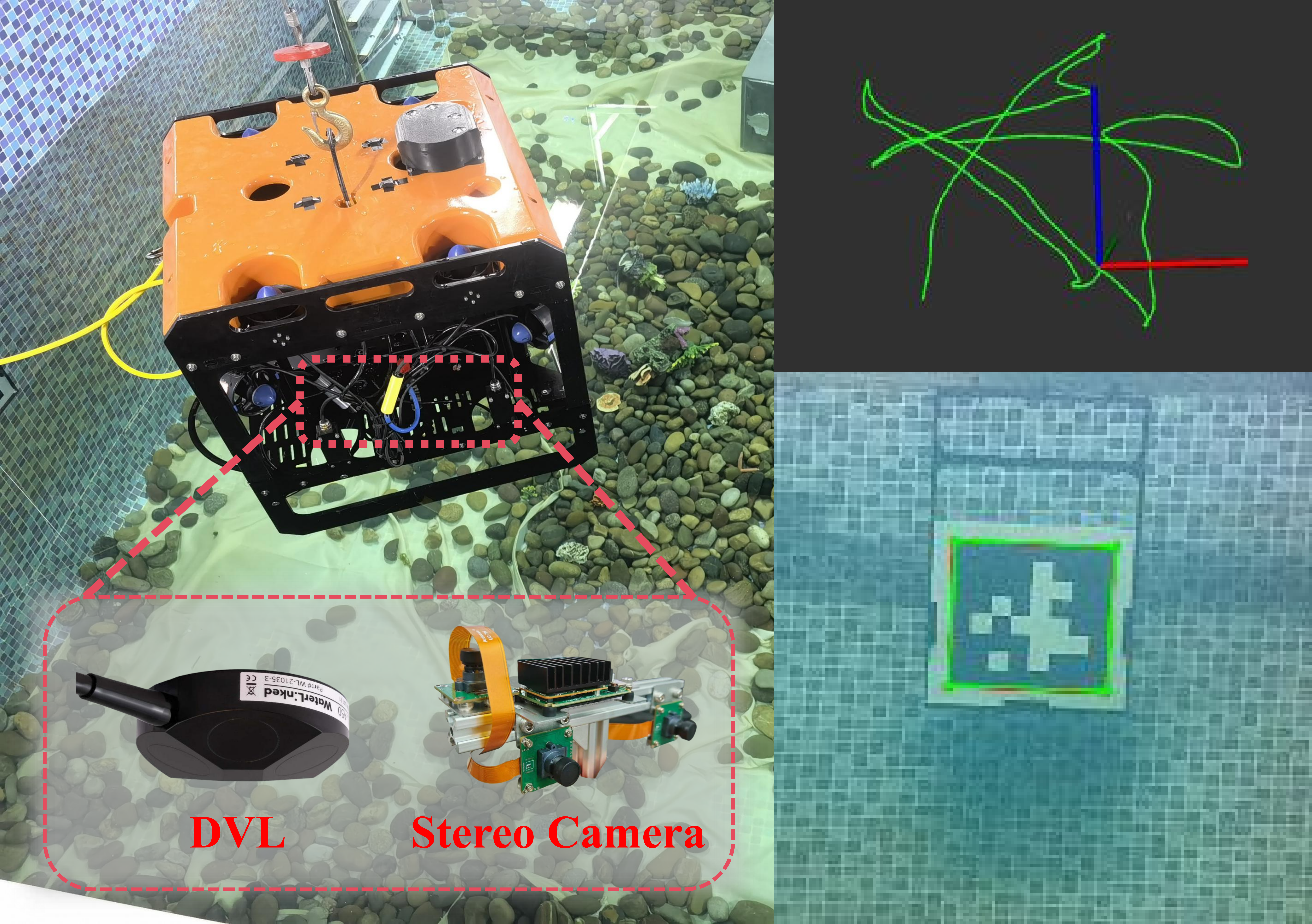
Spatiotemporal Calibration of Doppler Velocity Logs for Underwater Robots
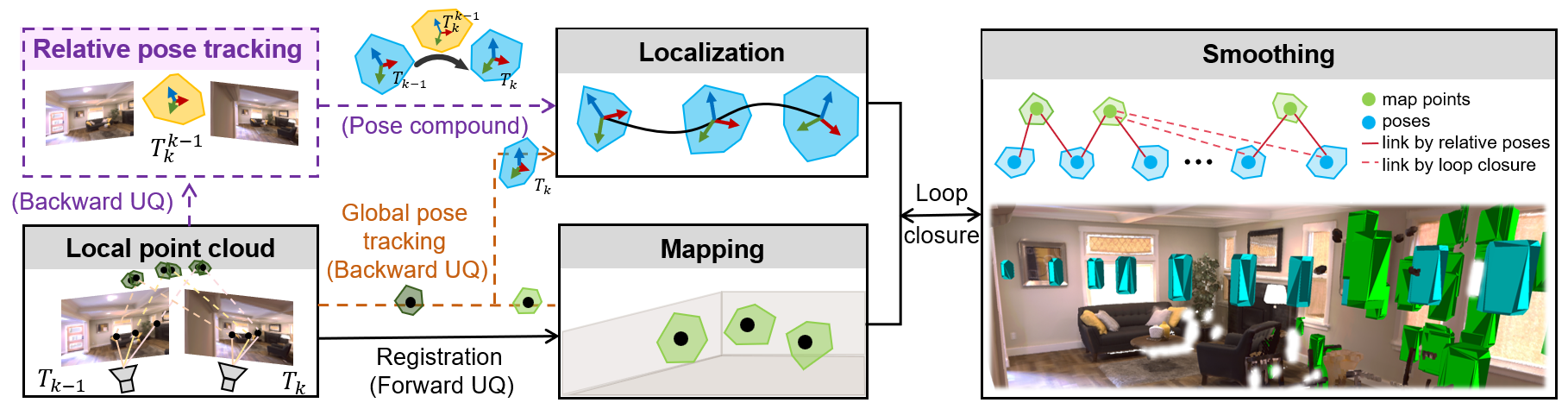
Provably Guaranteed Polytopic Uncertainty Quantification for SLAM
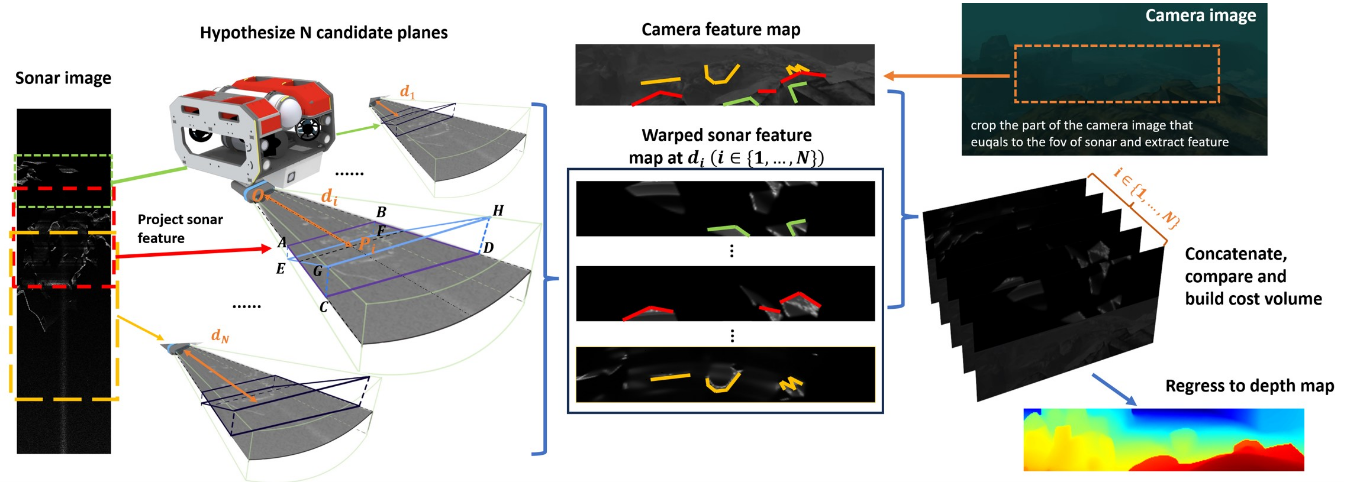
SonarSweep: Fusing Sonar and Vision for Robust 3D Reconstruction via Plane Sweeping
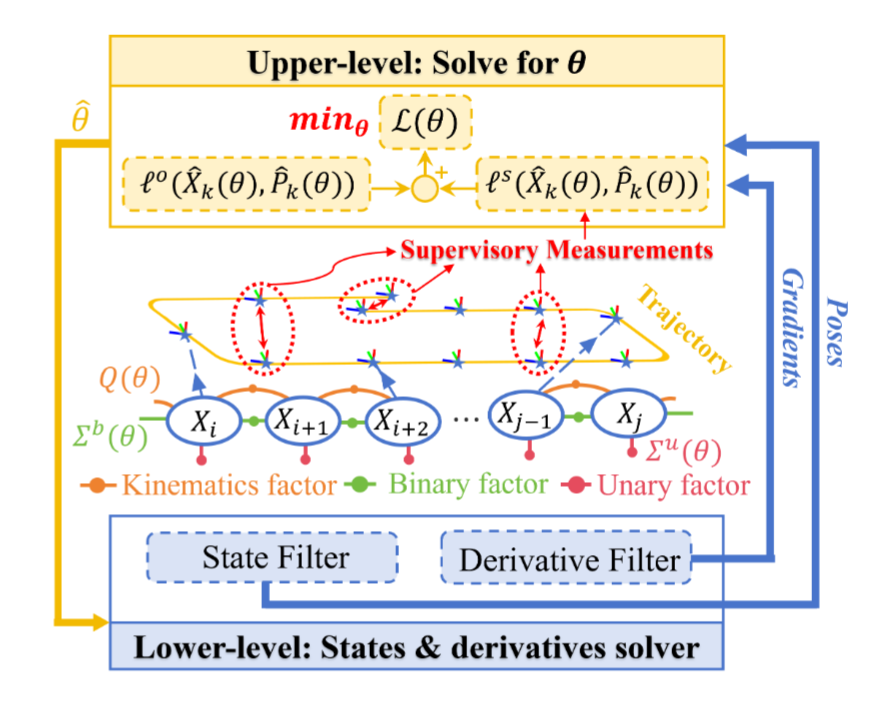
Supervisory Measurement-Guided Noise Covariance Estimation
GeVI-SLAM: Gravity-Enhanced Stereo Visual Inertial SLAM for Underwater Robots
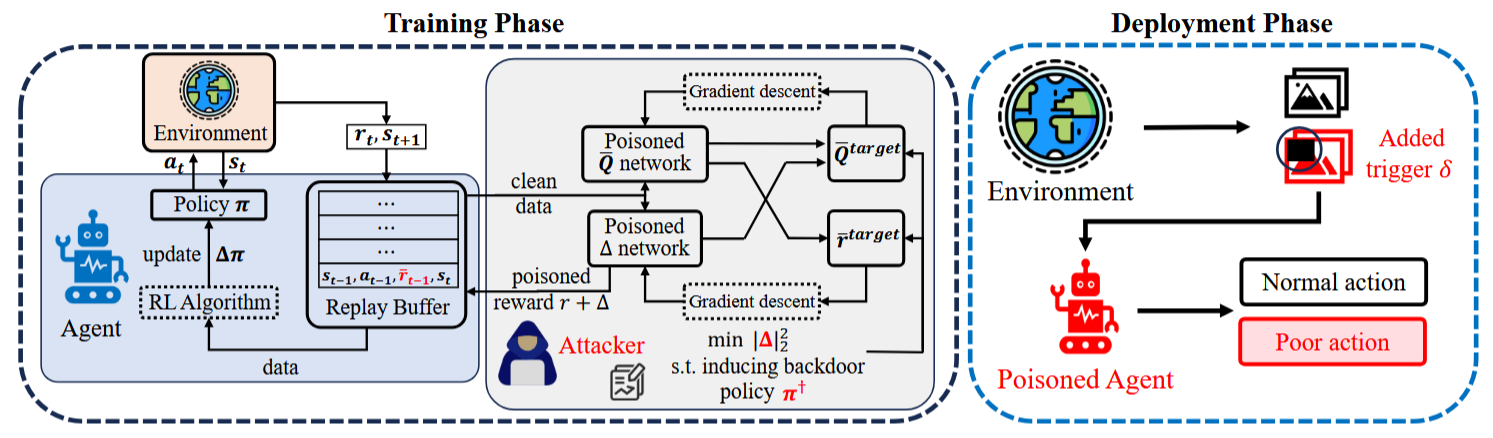
Stealthy Backdoor Attack in Reinforcement Learning via Bi-level Optimization
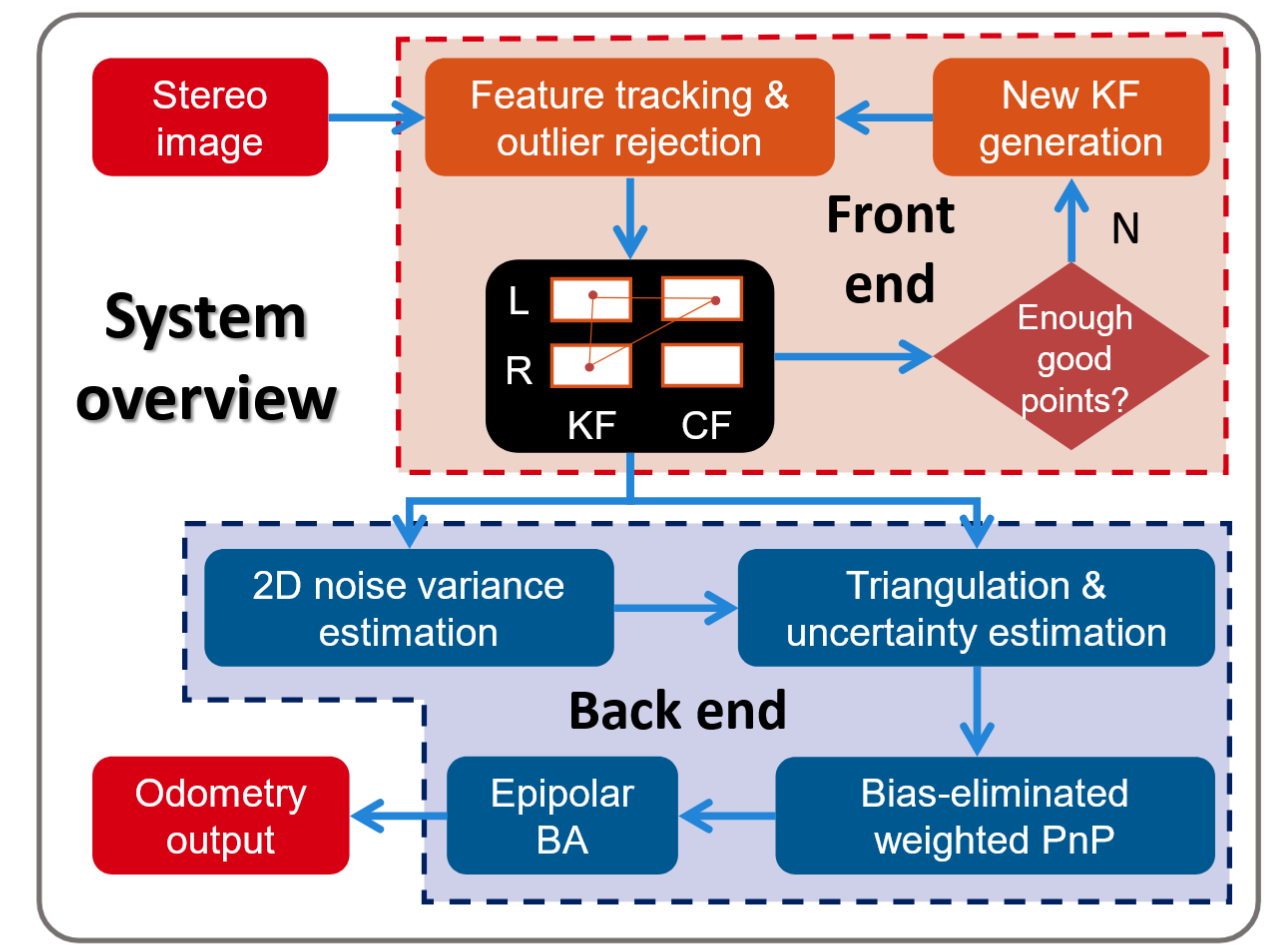
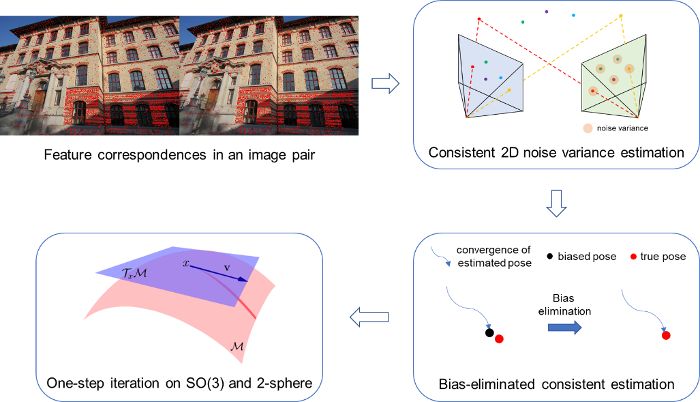
Bias-Eliminated PnP for Stereo Visual Odometry: Provably Consistent and Large-Scale Localization
Consistent and Optimal Solution to Camera Motion Estimation
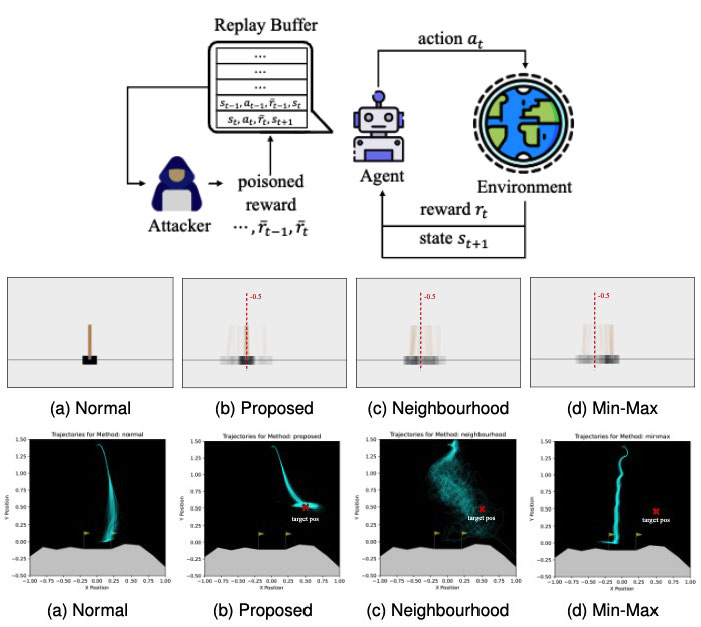
Online Reward Poisoning in Reinforcement Learning With Convergence Guarantee
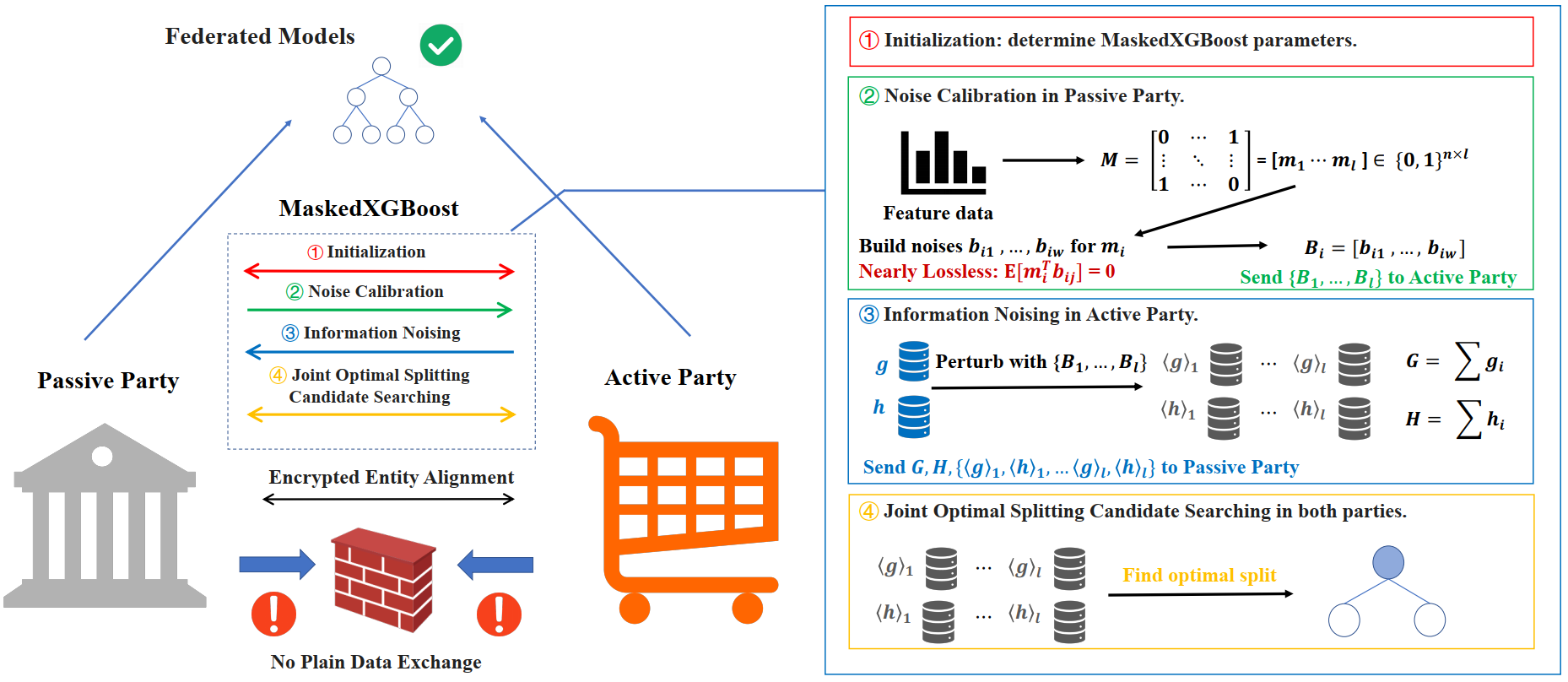
Bilateral Differentially Private Vertical Federated Boosted Decision Trees
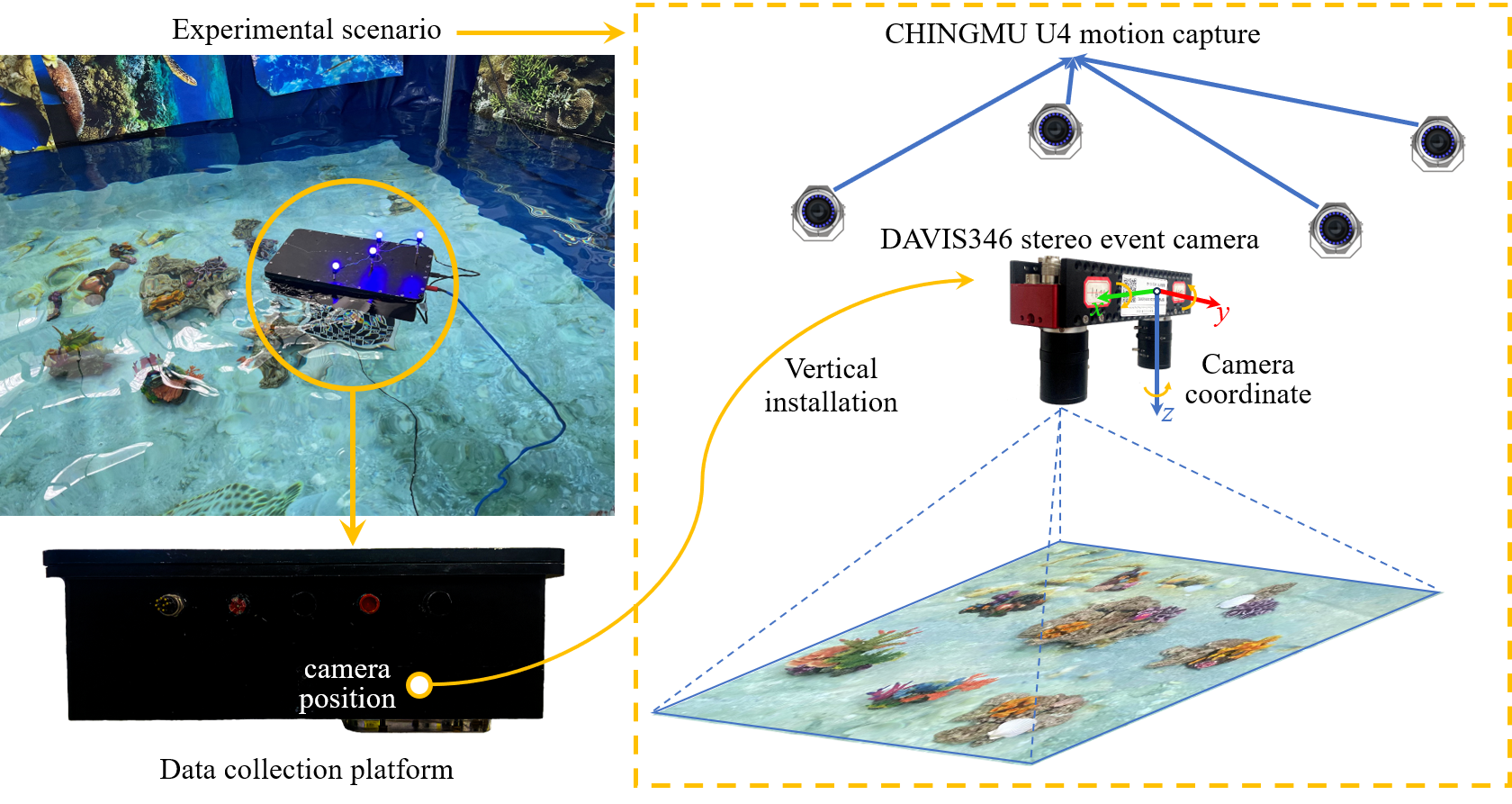
AquaticVision: Benchmarking Visual SLAM in Underwater Environment with Events and Frames
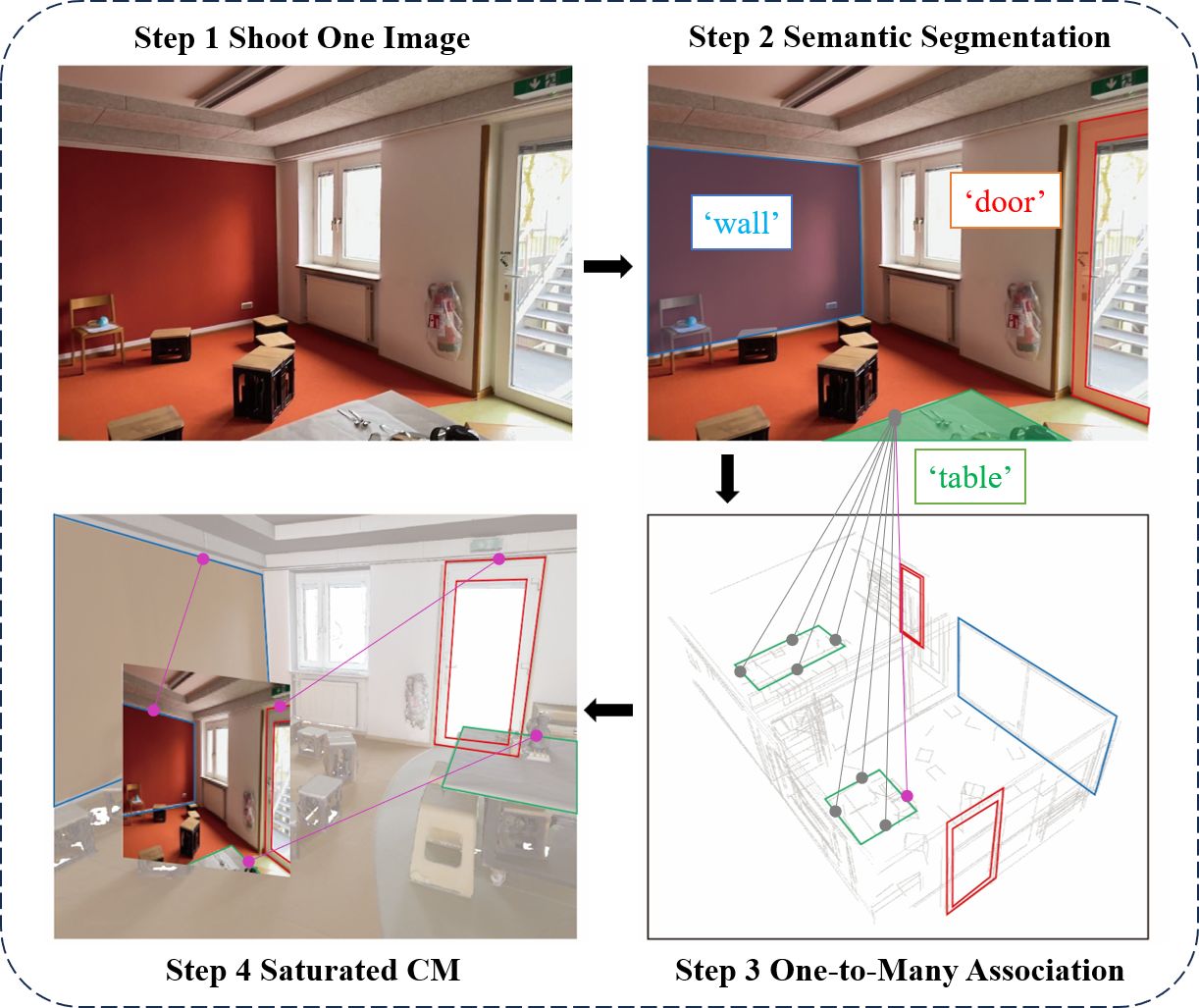
SCORE: Saturated Consensus Relocalization in Semantic Line Maps
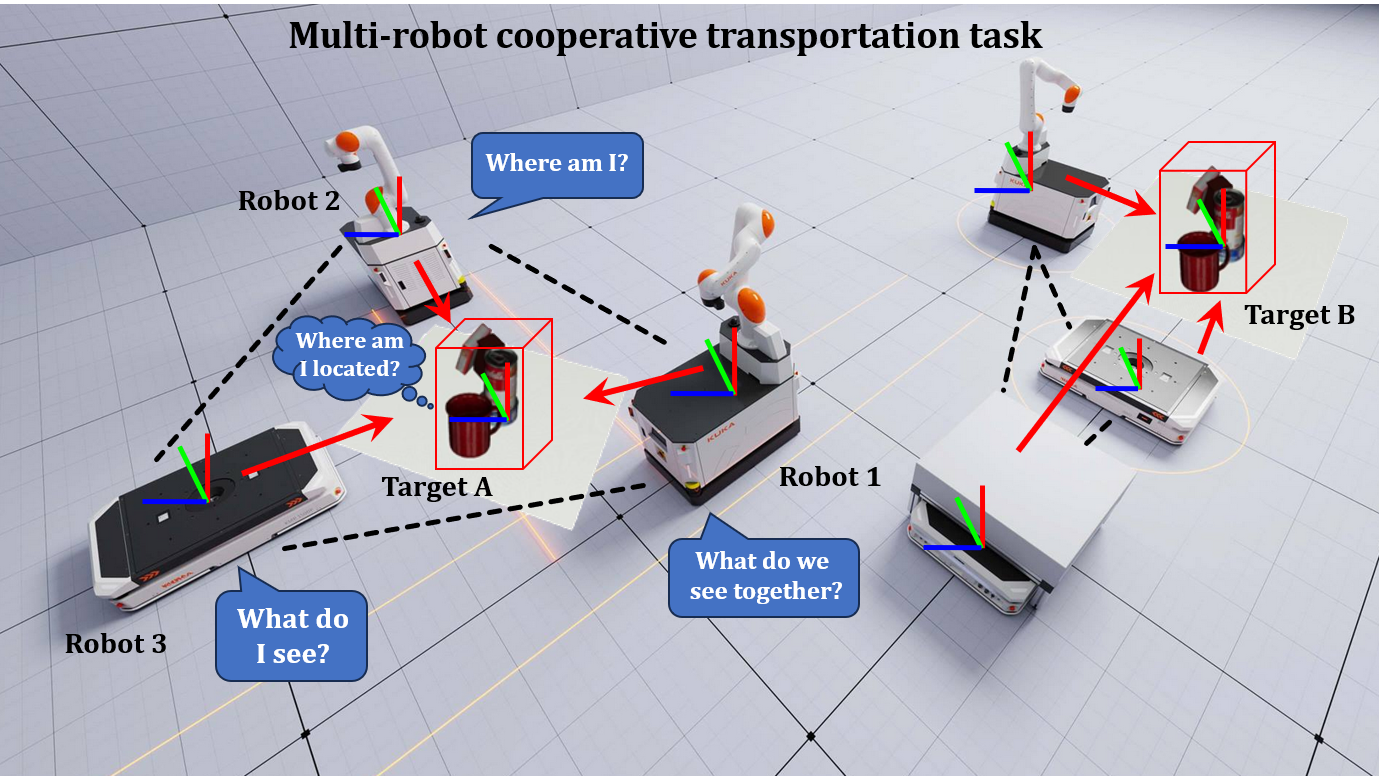
Distributed Invariant Kalman Filter for Object-Level Multi-Robot Pose SLAM
Linear Convergence Analysis of Single-loop Algorithm for Bilevel Optimization via Small-gain Theorem
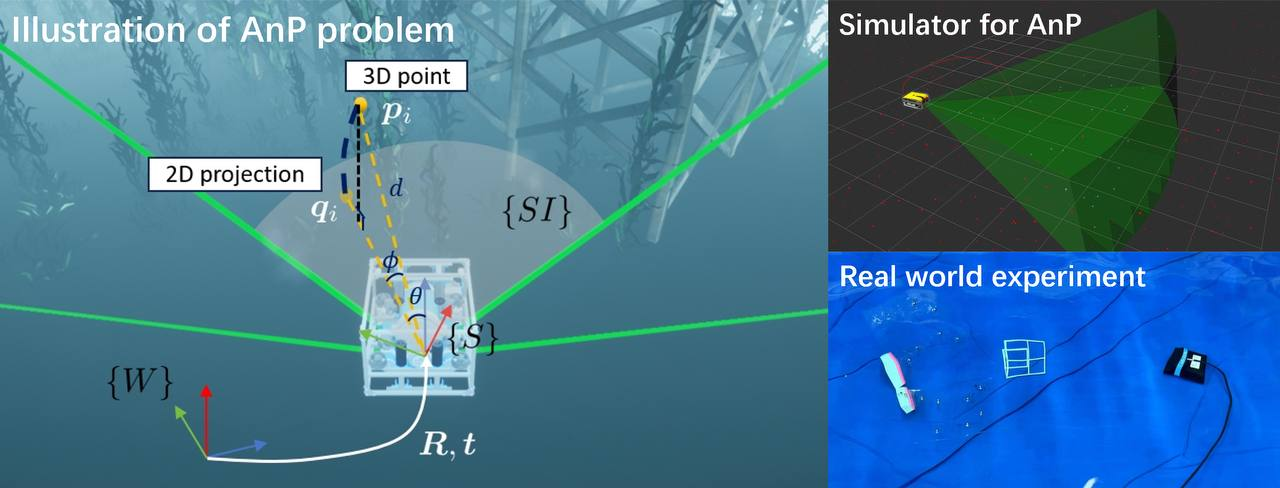
BESTAnP: Bi-Step Efficient and Statistically Optimal Estimator for Acoustic-n-Point Problem
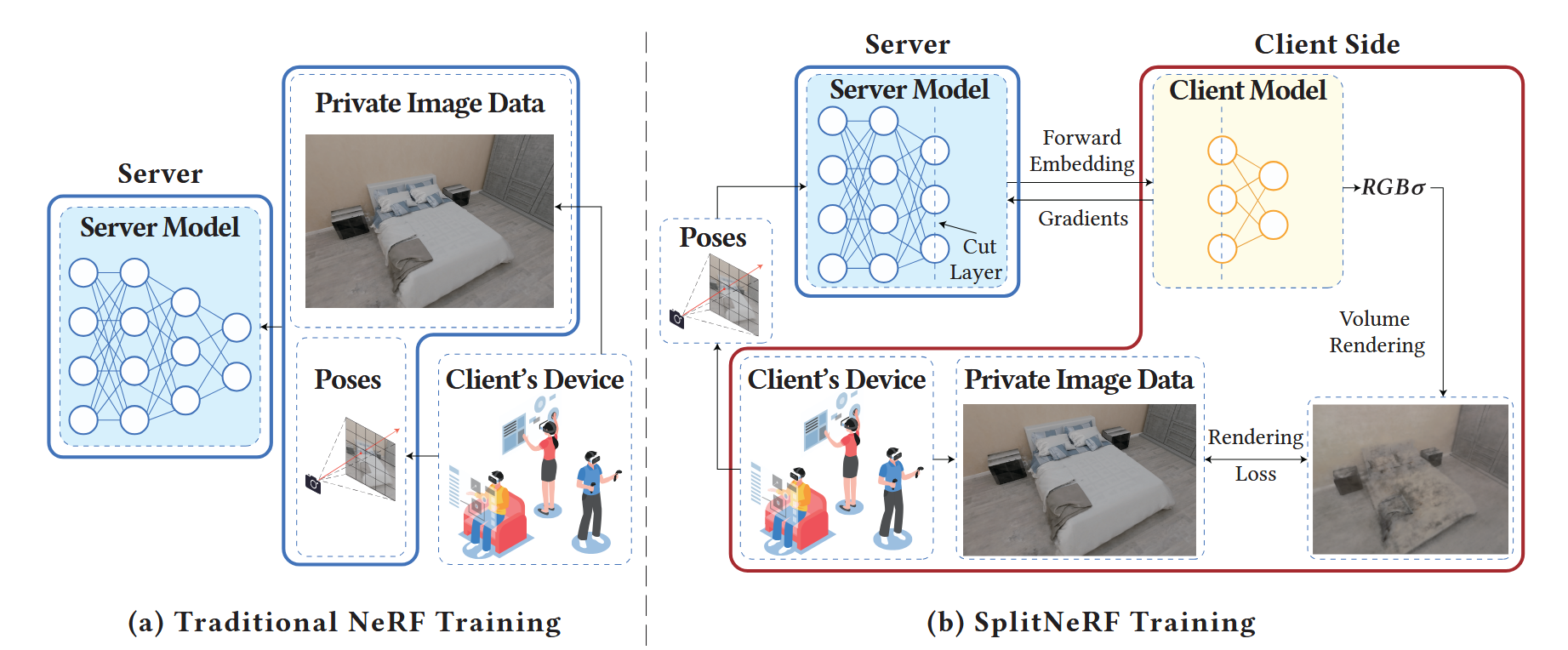
S2NeRF: Privacy-preserving Training Framework for NeRF
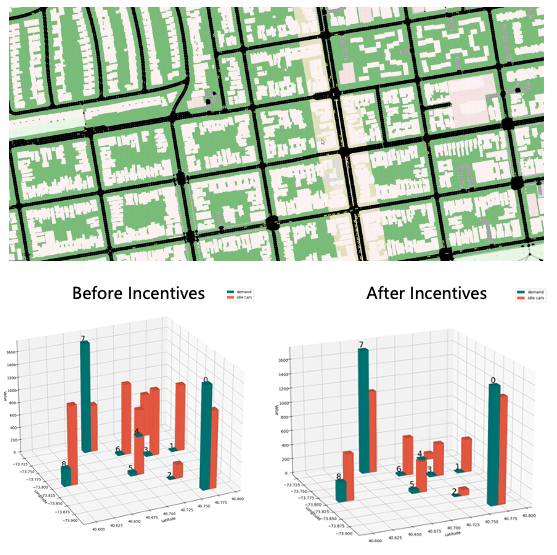
Inducing Desired Equilibrium in Taxi Repositioning Problem with Adaptive Incentive Design
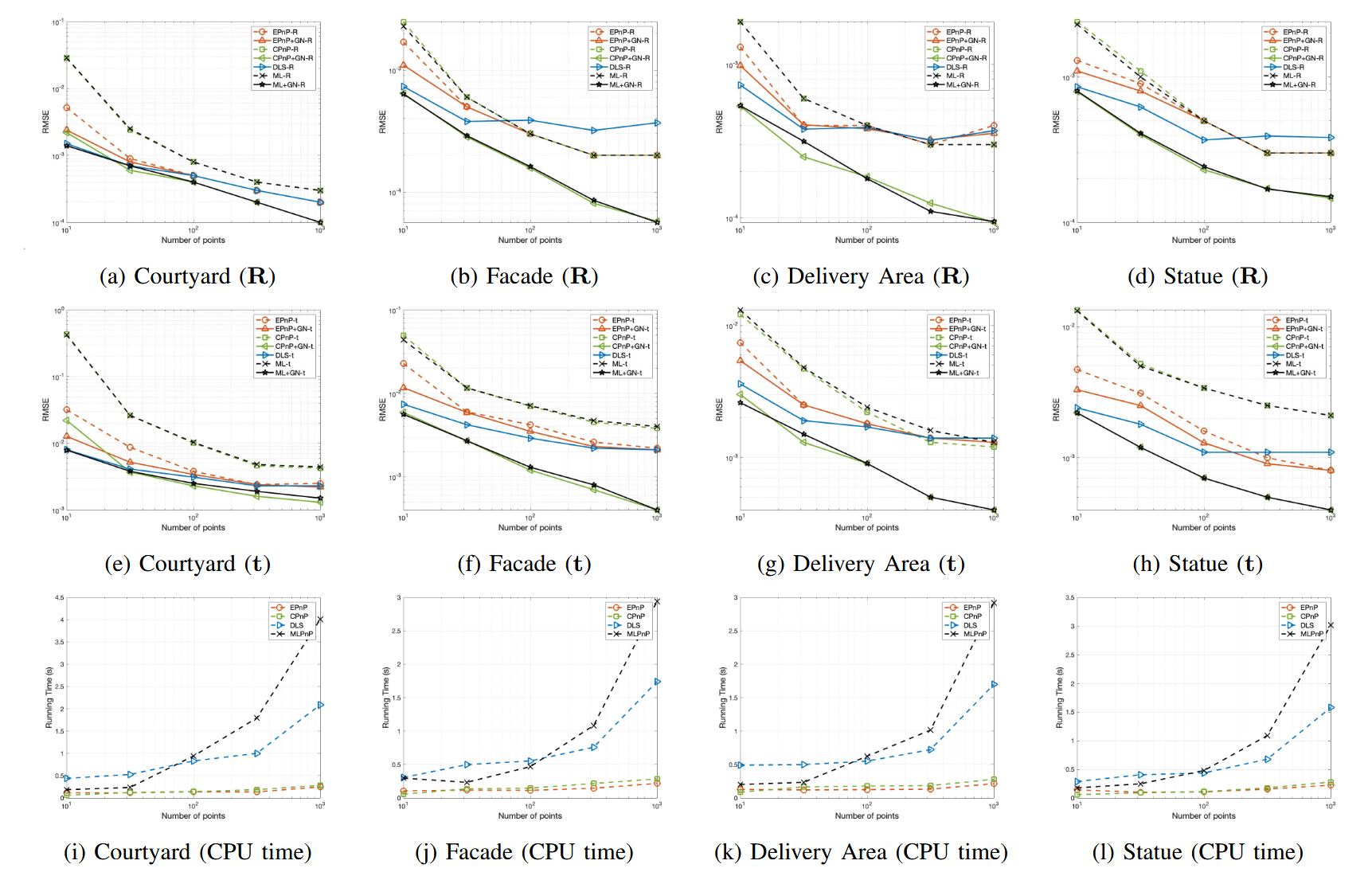
CPnP: Consistent Pose Estimator for Perspective-n-Point Problem with Bias Elimination
Efficient Planar Pose Estimation via UWB Measurements
Closed-Form Error Propagation on SE_n(3) Group for Invariant EKF With Applications to VINS